SAE TTLD - Transmission de Données à Très Grande Distance - BUT3 - S5
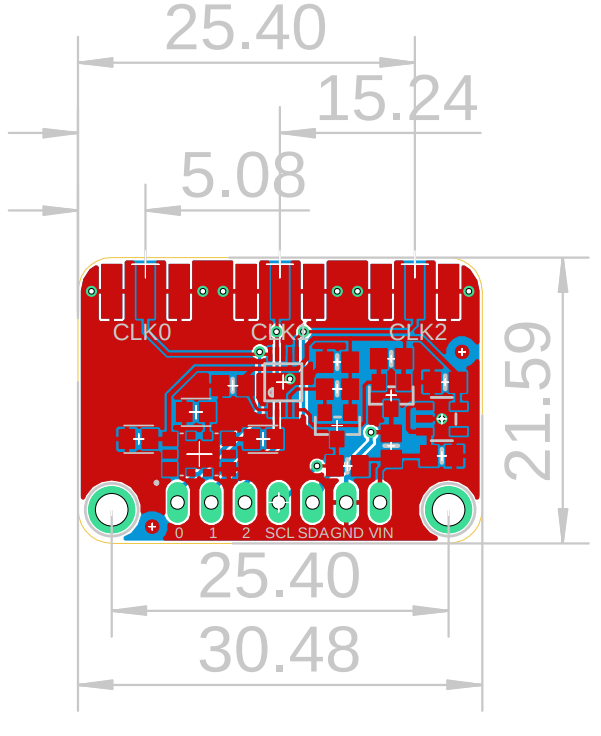
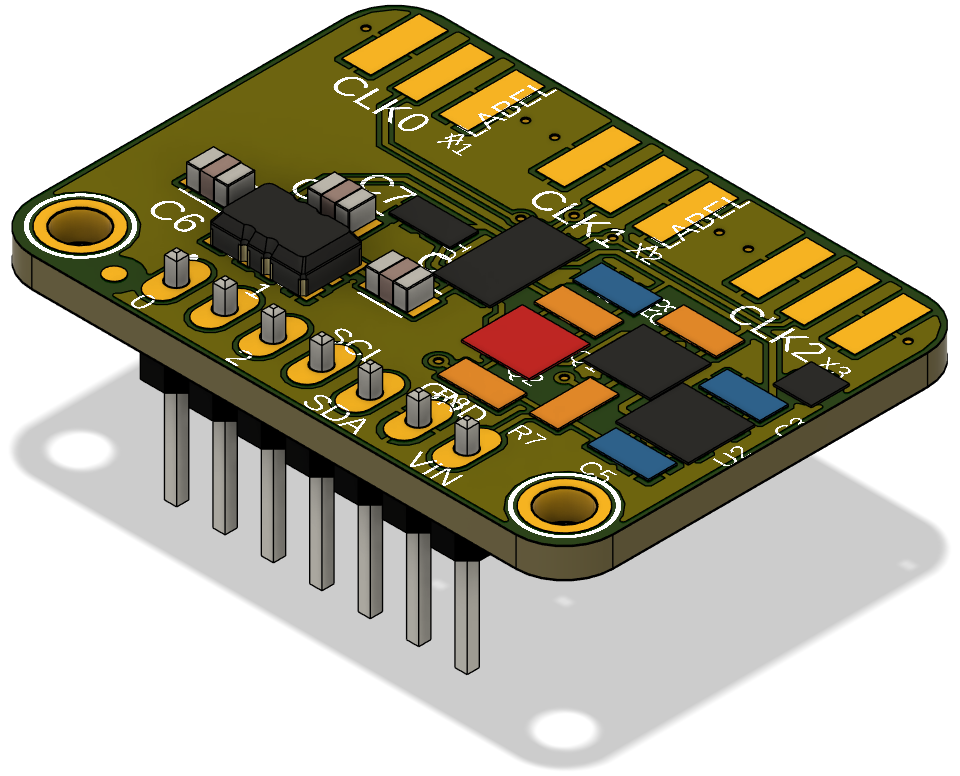
Routage du module de génération du signal (Fusion360)
Note : Les niveaux présentés dans "Caractéristiques" sont subjectifs. La signification précise est détaillée dans Détails des caractéristiques des projets universitaires.
J'ai participé à un projet collaboratif de développement d'un système de transmission de données à très grande distance basé sur le protocole WSPR (Weak Signal Propagation Reporter). Ce système vise à créer un émetteur autonome fonctionnant avec une puissance de l'ordre de la centaine de milliwatts, capable d'atteindre des distances de plusieurs milliers de kilomètres via la réflexion ionosphérique.
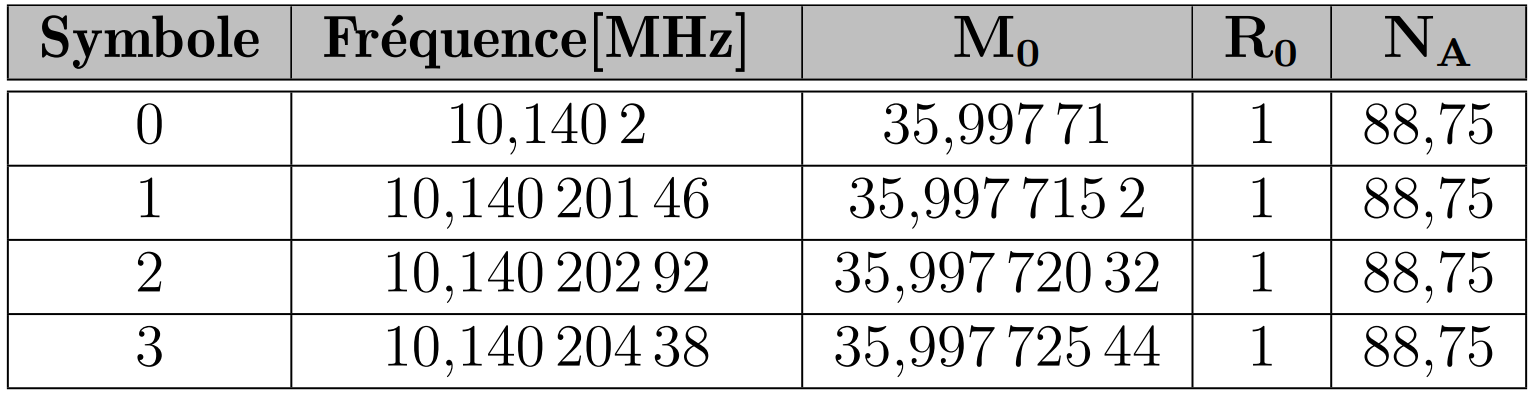
Le protocole WSPR, développé par Joe Taylor (K1JT, prix Nobel de physique), exploite une modulation 4-FSK sur la bande des 30 mètres (10,14 MHz) avec des transmissions synchronisées sur les minutes paires. Le défi principal réside dans la stabilité fréquentielle requise : les symboles 4-FSK sont espacés de seulement 1,46 Hz sur une bande de 400 Hz, nécessitant une précision de ±1 Hz sur 10 MHz.

Dans ce projet d'équipe de 4 personnes, j'ai personnellement pris en charge la conception du module de génération du signal, le développement de la librairie d'abstraction en C, ainsi que l'analyse complète de stabilité fréquentielle incluant la conception des tests et l'environnement de qualification.
J'ai conçu un module de génération de signal basé sur une PLL SI5351A cadencée par un TCXO 25 MHz pour garantir la stabilité fréquentielle cruciale. La contrainte principale était d'assurer une dérive inférieure à ±1 Hz sur 10 MHz pour permettre la discrimination des symboles 4-FSK espacés de 2 Hz.
Ma conception s'appuie sur un TCXO (Temperature Controlled Oscillator) 536L25001IT5O qui compense activement les dérives thermiques du quartz. Contrairement aux oscillateurs classiques, ce composant intègre une régulation en température pour maintenir la stabilité sur une large plage d'utilisation. Le routage du circuit a été réalisé sous Fusion 360 avec une attention particulière portée aux pistes RF et au plan de masse.
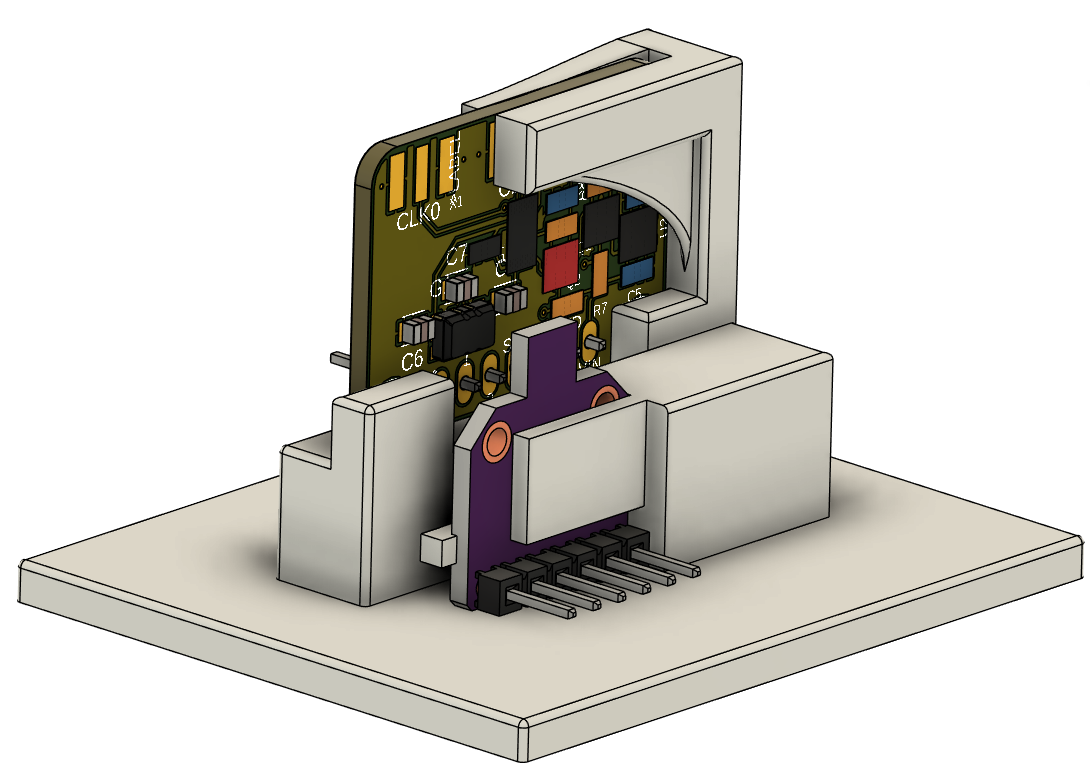
Pour valider la conception, j'ai développé un support de test par impression 3D permettant l'alignement précis entre le module PLL et un capteur de température BME680. Ce support, également conçu sous Fusion 360, maintient un positionnement thermique constant pendant les mesures de dérive fréquentielle.
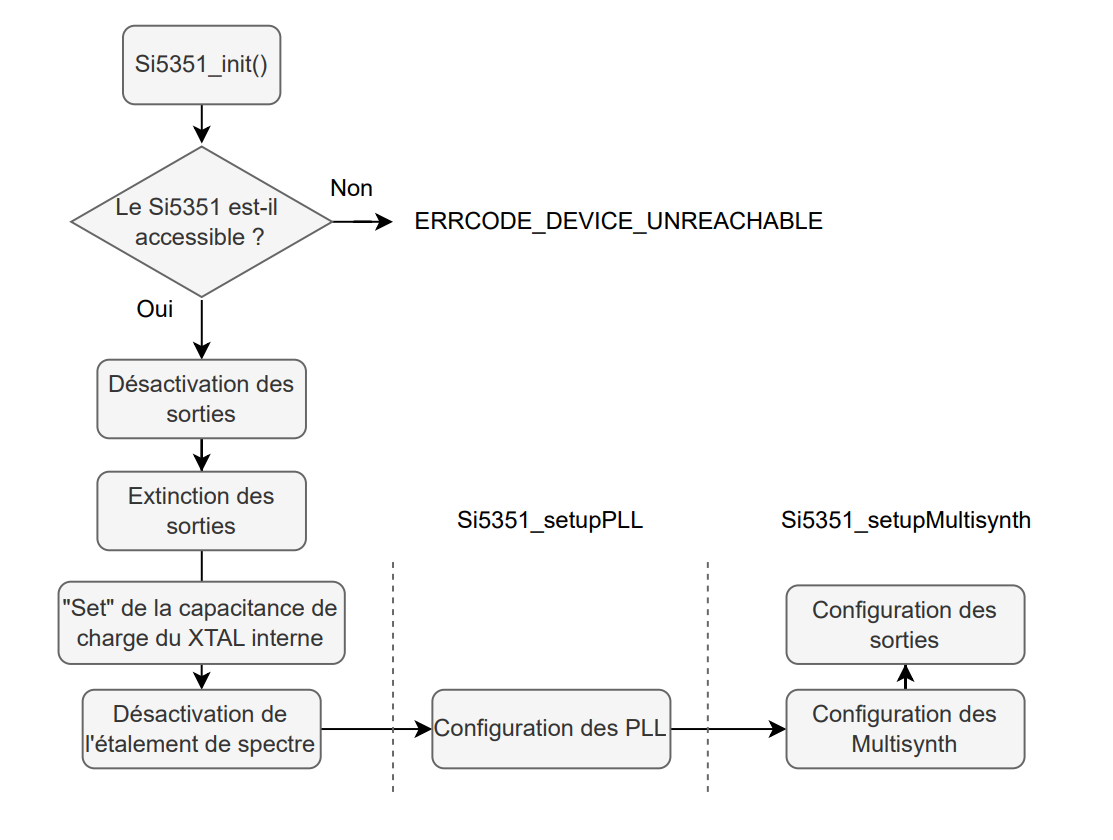
J'ai créé une librairie complète en C pour l'abstraction du module SI5351, encapsulant toute la complexité de configuration via I2C. L'architecture de la librairie s'appuie sur des structures configurables et un système de gestion d'erreurs robuste pour faciliter l'intégration embarquée.
Ma stratégie de développement évite les calculs flottants embarqués en pré-calculant les registres de configuration avec ClockBuilder Pro. Cette approche garantit des temps d'exécution déterministes tout en assurant une modulation 4-FSK précise selon l'équation :
La librairie implémente un système de propagation d'erreurs avec des macros ASSERT et PEDDLE_ERRCODE, permettant une gestion robuste des défaillances I2C. L'architecture modulaire facilite l'extension pour d'autres projets STM32 nécessitant une génération de signaux précise.
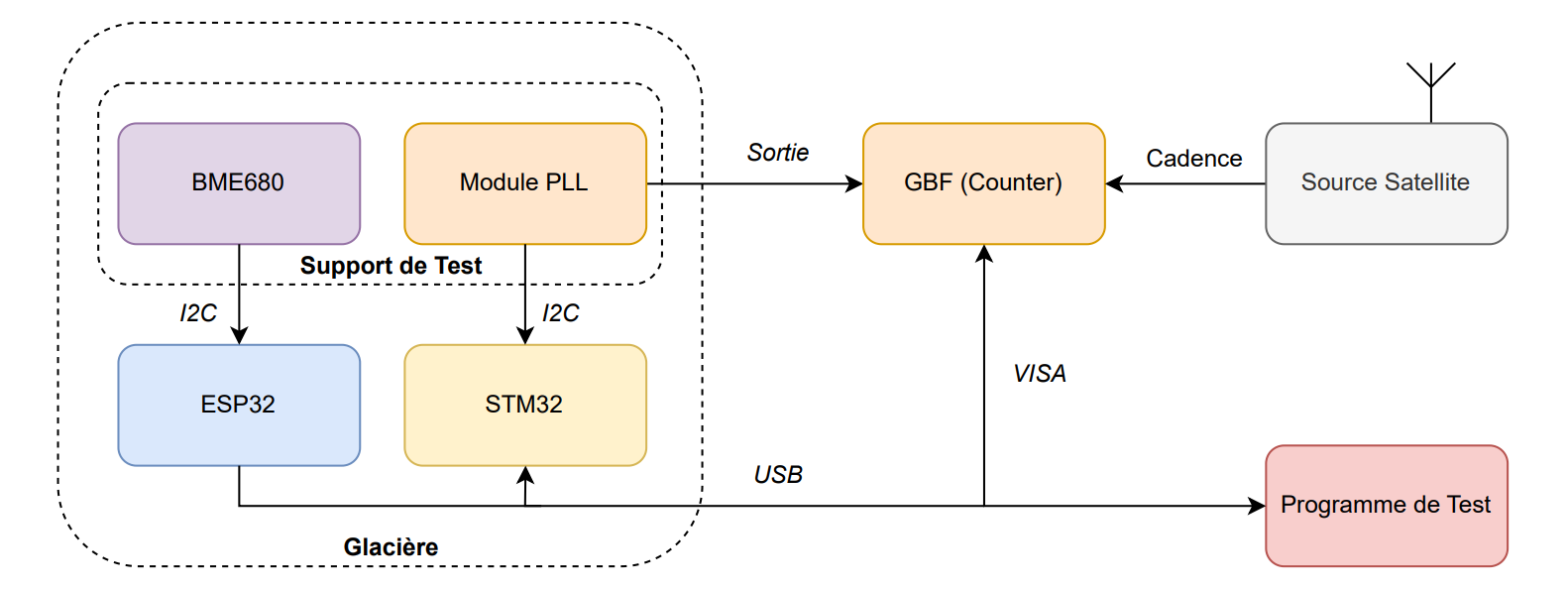
J'ai développé un environnement de test complet pour caractériser la stabilité fréquentielle du module. Le banc de test que j'ai conçu utilise une glacière pour le contrôle thermique, un fréquencemètre cadencé par source satellite pour la précision, et un système d'acquisition automatisé en Python.
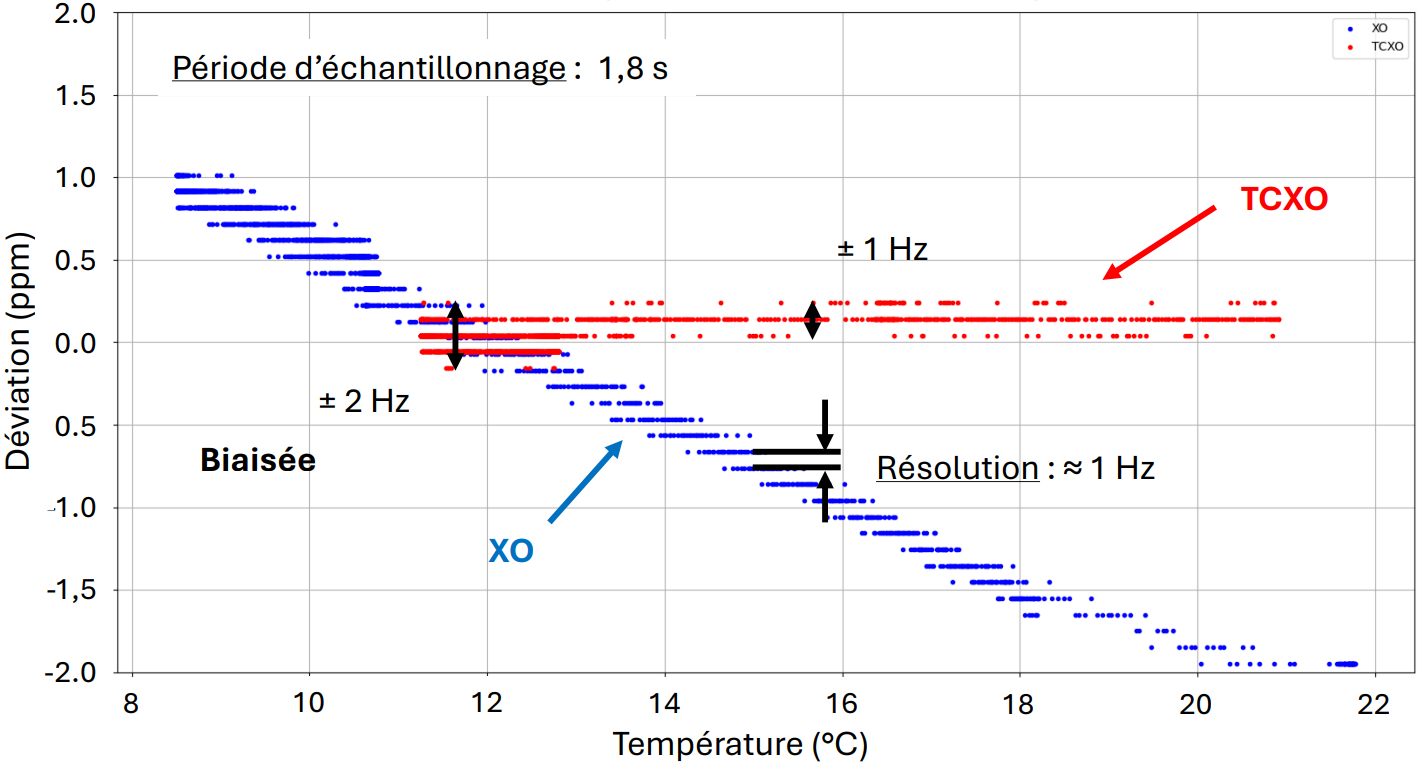
Mes tests comparatifs entre oscillateur standard et TCXO démontrent l'efficacité de la régulation thermique. Sur une plage de température de 8,5°C à 21,8°C, j'ai mesuré une variation de ±0,994 Hz, soit une stabilité de ±0,1 ppm, largement suffisante pour discriminer les fréquences WSPR espacées de 2 Hz.
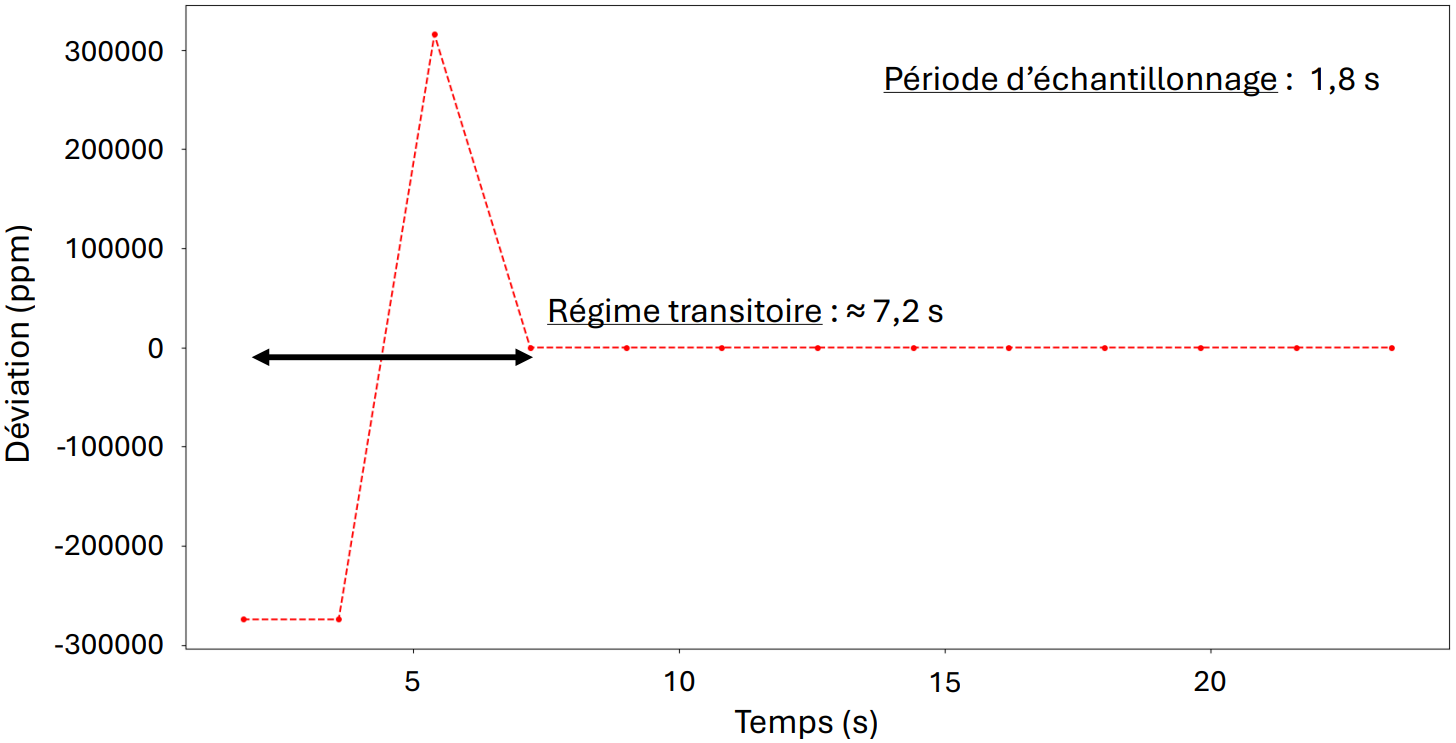
J'ai également caractérisé le temps de chauffe du TCXO à 4 secondes maximum, information cruciale pour la gestion énergétique du système autonome. Ces données permettent d'optimiser les cycles de mise sous tension avant chaque transmission WSPR.
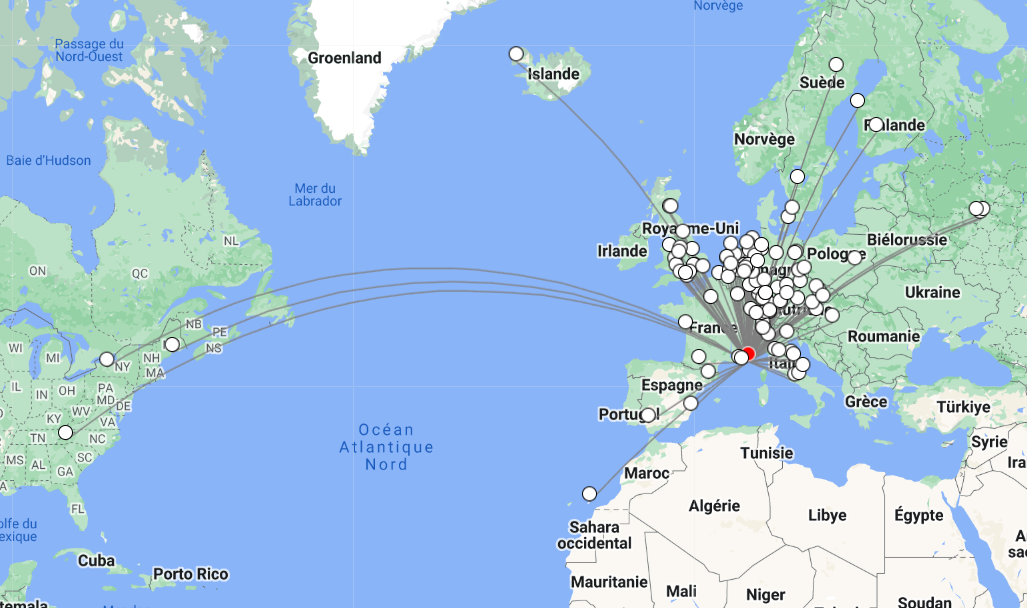
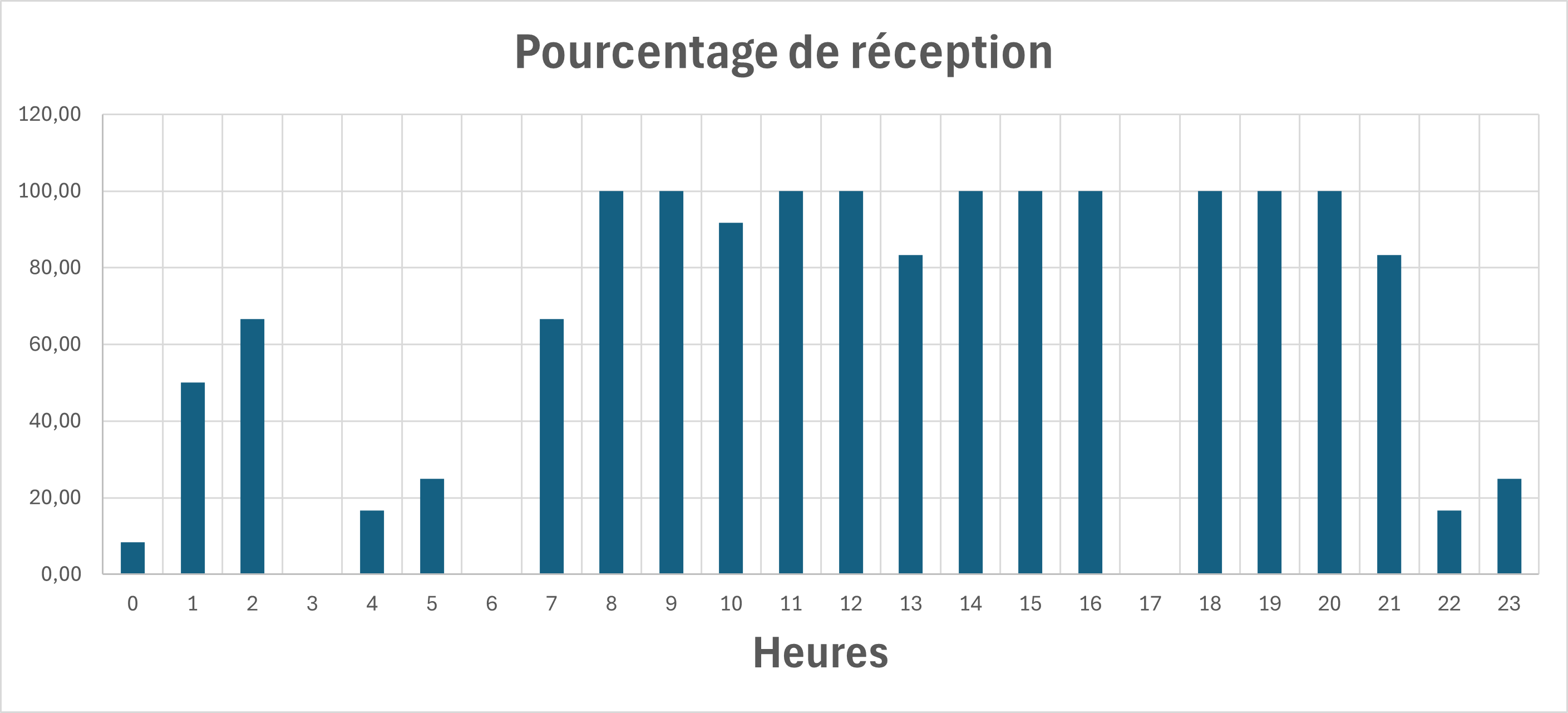
L'intégration de mon module dans le système complet a permis de valider l'architecture globale. Les tests en conditions réelles sur 5 jours ont démontré la portée du système avec 2705 réceptions et une distance maximale de 7340 km (Tennessee, USA). La stabilité fréquentielle de mon module a été cruciale pour ces performances.
Ce projet m'a permis de maîtriser la conception RF de précision, depuis la spécification des composants critiques jusqu'à la validation expérimentale. L'utilisation de Fusion 360 pour le routage PCB et la conception mécanique 3D illustre l'importance d'une approche intégrée hardware-software dans les systèmes embarqués modernes.
Le développement de la librairie d'abstraction en C a renforcé mes compétences en architecture logicielle embarquée, particulièrement pour la gestion d'erreurs et l'optimisation des performances temps réel. L'approche de pré-calcul des registres constitue une méthode efficace pour éviter les calculs flottants en embarqué.
L'analyse de stabilité fréquentielle que j'ai menée démontre l'importance de la validation expérimentale en RF, où les simulations ne reflètent qu'imparfaitement la réalité physique. Cette expérience constitue une base solide pour mes futurs développements en systèmes de communication haute précision.